Датчик Ультразвука
Ультразвуковой дальномер HC-SR04 – это помещенные на одну плату приемник и передатчик ультразвукового сигнала. Излучатель генерирует сигнал, который, отразившись от препятствия, на приемник. Измерив время, за которое сигнал проходит до объекта и обратно, можно оценить расстояние. Кроме самих приемника и передатчика, на плате находится еще и необходимая обвязка, чтобы сделать работу с этим датчиком простой и удобной.
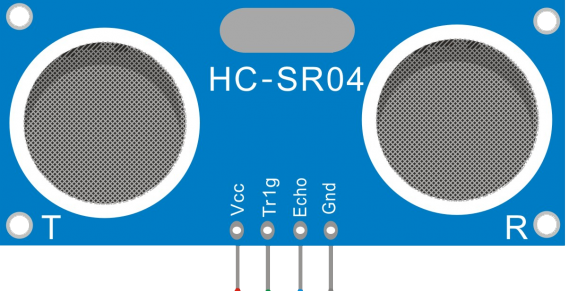
Класс позволяет считывать расстояние от ультразвукового датчика HCSR04 или аналогичного.
Он использует внутреннее аппаратное устройство SPI для измерения длины возвращаемого эха,
поэтому по умолчанию вы должны подключить контакт echo сонара к pin14 micro:bit,
а контакт Trig сонара к pin15 micro:bit.
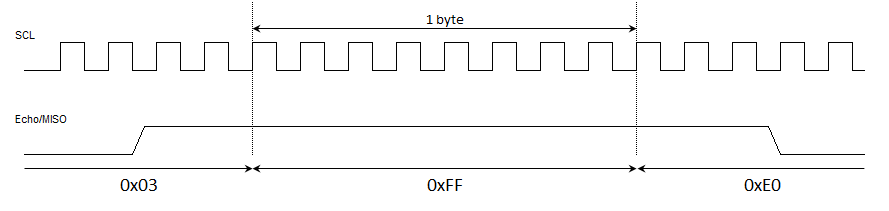
Датчик имеет один излучатель и приемник. Частота импульсов датчика около 10 микросекунд. Когда он получает сигнал от micro:bit, он посылает ультразвуковой сигнал через излучатель. Приемник улавливает отражение звука. Ширина импульса «эха» эквивалентна времени, которое требуется звуку, чтобы достичь объекта и вернуться. Это в два раза больше, чем расстояние до объекта.
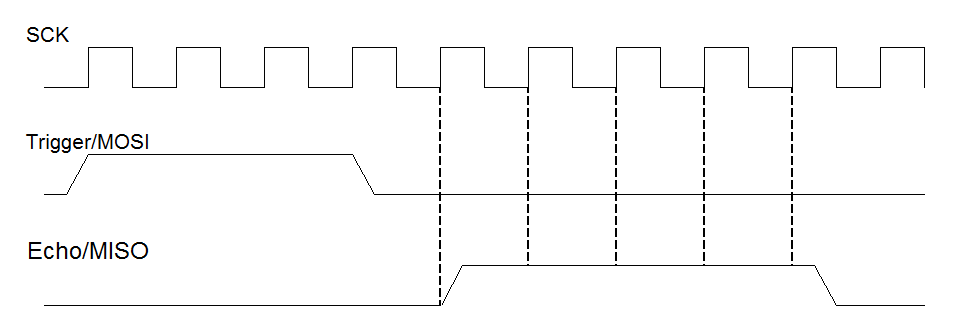
Библиотека использует внутреннее аппаратное устройство spi для измерения «эха». SPI работает, используя один контакт для установки тактовой частоты с импульсами на требуемой частоте. Другой контакт используется для передачи битов в каждом тактовом цикле, а последний контакт используется для приема битов от другого устройства. Библиотека отправляет импульс через MOSI и ожидает получения чего-либо через MISO. Затем он измеряет длину возвращаемого импульса, считая эквивалентные «биты»
Класс
- class Ultrasonic
Класс используется для определения объектов, имеющих поведение ультразвукового датчика
sonar = Ultrasonic( trigger, echo, speed_sound)
Параметр speed_sound - скорость распространения звука при комнотной температуре. По умолчанию показатель равен 343 000, Вы можете его корректировать:
- distance_mm()
Возвращает расстояние до объекта в миллиметрах
- exception distance_сm
Возвращает расстояние до объекта в сантиметрах
Пример программы
from microbit import display, pin1, pin2, sleep
from Ultrasonic import Ultrasonic
sonar = Ultrasonic(pin2, pin1)
while True:
display.scroll(int(sonar.distance_mm()))
sleep(1000)