Сервопривод
Для контроля положения вала, на сервоприводе установлен датчик обратной связи, например потенциометр или энкодер. Позиционер преобразует угол поворота вала обратно в электрический сигнал.

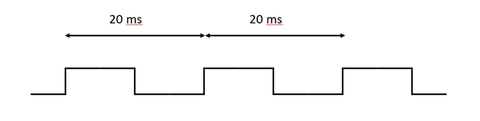
Для работы сервопривода мы должны послать ему импульсный сигнал частотой 50 Гц (Гц). Это стандарт почти для всех серводвигателей постоянного тока. Импульсный сигнал выглядит так:

50 Гц означает, что один импульс происходит 50 раз в секунду. Если разбить его по-другому, один импульс отправляется каждые 1/50 секунды , что равно 20 миллисекундам (сокращенно мс).
Класс
- class Micro_Servo
Класс используется для определения объектов, имеющих поведение серво-моторов.
Пример объявления объекта:
servo=Micro_Servo(pin0)
- servo.angle(arg: int)
Команда перемещает сервомотор в указанный угол.
Пример программы
from microbit import button_a, pin0, sleep
from Micro_Servo import Micro_Servo
servo = Micro_Servo(pin0)
while True:
if button_a.was_pressed():
for i in range(180):
servo.angle(i)
sleep(10)